Principles of Stellar Interferometry. Plastic Analysis and Design of Steel Structures. Micro and Nanomechanics, Volume 5. Nonlinear Guided Wave Optics. Laser Velocimetry in Fluid Mechanics. Design of Special Planar Linkages. Reinforced Polymer Matrix Syntactic Foams. Information Optics and Photonics. Theory and Practice of Gearing and Transmissions. Advances in Italian Mechanism Science. Dynamics of Crank-Piston Mechanisms. Biorefinery in the Pulp and Paper Industry. Finite Elements, Electromagnetics and Design. Formulas for Structural Dynamics: Tables, Graphs and Solutions.
Finnie's Notes on Fracture Mechanics. Ultrasonic Guided Waves in Solid Media. Heat, Bearings, and Lubrication. Dynamics and Control of Advanced Structures and Machines. How to write a great review. The review must be at least 50 characters long. The title should be at least 4 characters long. Your display name should be at least 2 characters long.
Advanced Dynamics and Model-Based Control of Structures and Machines - PDF Free Download
At Kobo, we try to ensure that published reviews do not contain rude or profane language, spoilers, or any of our reviewer's personal information. You submitted the following rating and review. We'll publish them on our site once we've reviewed them. Item s unavailable for purchase. Please review your cart. You can remove the unavailable item s now or we'll automatically remove it at Checkout. Continue shopping Checkout Continue shopping. Chi ama i libri sceglie Kobo e inMondadori.
Available in Russia Shop from Russia to buy this item. Or, get it for Kobo Super Points! Ratings and Reviews 0 0 star ratings 0 reviews. Overall rating No ratings yet 0. How to write a great review Do Say what you liked best and least Describe the author's style Explain the rating you gave Don't Use rude and profane language Include any personal information Mention spoilers or the book's price Recap the plot.
Close Report a review At Kobo, we try to ensure that published reviews do not contain rude or profane language, spoilers, or any of our reviewer's personal information. For the description of the viscohyperelastic behavior of filled elastomers, the constitutive equations are proposed. These equations represent the experimental values of stresses as the sum of two parts: The hyperelastic part is defined by the hyperelastic potential.
The viscoelastic one is described by the nonlinear analogue of the equations of linear theory of viscoelasticity. The method for the determination of the parameters and the material functions is proposed. The comparisons of experimental data with the results of theoretical predictions are presented. Instead they usually constitute the base of polymer composites which preserve the elasticity of rubber but demonstrate improved deformation and strength properties.
This strengthening of polymer materials is gained by an infusion into the rubber compound of dispersed inorganic particles — the fillers. Better strengthening is achieved for filler particles of a smaller size. A similar effect is discussed in [1]. In particular, infusion of coarse particles into the rubber compound is shown to T.
Use of nanoparticle fillers such as carbon black increases Young modulus and the strength limit up to ten times. In the meantime, the filled elastomers preserve the strain limit of the initial pure rubber. Therefore the use of nanoparticle insertions for rubber compounds allows one either to improve the deformation properties of the material, for the same filler admixture, or to achieve the required stiffness and the strength properties with a reduced fillers admixture.
The filler under consideration is characterised by a low dispersion of particle sizes within 20—25 nm , with the specific surface 1: The elastomer specimens were tested under the conditions of uniaxial tension and uniaxial compression. In addition stress relaxation tests were performed both under the tension and the compression. All experiments were carried out at room temperature. The proper constitutive relations are suggested describing hyperviscoelastic properties of the filled elastomers, and the results of the approximations are compared with the experimental data obtained.
So high strain limits are specific for unfilled rubbers. The experiments were carried out with the use of the testing equipment specially deviced for polymeric materials. The corresponding electromechanical device was designed in the Institute of Mechanics of Moscow State Lomonosov University and it allows to test low-strength materials under the conditions of constant strain rate, stress relaxation, and load-unload process.
The strain gauge system was used to measure the tensile load. The uniaxial tension tests were carried out using the specimens with the gage length 40 mm. The tested specimens were cut from a 2 mm-thick plate of the material. The solid cylinder specimens of 10 mm in diameter and 12 mm in height were used for the tests under the compression. The experimental diagrams for the material under consideration are presented in Fig. Viscoelastic properties of the elastomer are investigated on the base of stress relaxation tests under both tension and compression conditions.
In these experiments, the levels of strain were up to 0. Our experimental dependencies of the engineering Experimental Studies of Thermoviscohyperelastic Behaviour of Filled Elastomers 29 Fig. In the relaxation tests under the condition of tension, the strain increases at the constant rate 0. The experiments for the stress relaxation in compression were carried out for the following values of the strain: It can be seen from Figs.
An increase of the strain results in a decrease of the relaxation modulus, though this effect is more significant for the case of tension. Under the conditions of compression the values of relaxation modulus depends weakly on the strain level. Thus, the components of the stress tensor can be presented as a sum of the hyperelastic and viscoelastic parts [3]: We take the elastic potential W in a polynomial form depending on the invariants.
In particular, the five-constant polynomial hyperelastic potential W.
- Lesson Learned - Erotic Short Story for Women.
- Play Me!
- Reinforced Plastics Handbook.
- Voyage du jeune Anacharsis en Grèce dans le milieu du quartrième siècle avant lère vulgaire . T. 1. (1) (French Edition)?
For incompressible materials I3 D 1. The viscoelastic part of the stress tensor, in a general nonlinear form of constitutive relations, is taken as: As one can see from the stress relaxation curves at Figs. This justifies our use of the linear viscoelastic relations and guarantees that the error made is not large within the considered range of strains.
The function of relaxation in relations 4 can be approximated by a sum of exponents: Constitutive relations 1 , 2 , 4 , and 5 imply that the quasistatic hyperelastic part of stresses and the viscoelastic part can be separated in description of a stress— strain state of elastomer materials. The viscoelastic part of stresses determines the dependence of the material deformation properties on the loading history. The stresses tend to their hyperelastic part under the conditions of slow loading.
In particular, the authors of paper [3] suggest that the hyperelastic part of the stress tensor should be determined from experiments at low as compared to the values considered in this work strain rates 0. However, if the investigated strain rates are comparable with the experimental ones, another method can be used to determine the hyperelastic part of the stresses. The suggested approach is based on extracting asymptotic values of the axial stress from relaxation tests at different strain levels. Indeed, consider loading at a constant strain rate "P11 , taking place for the time t0 , up to the strain level " D "P 11 t0 and the subsequent stress relaxation process.
On the base of 1 , 2 , 4 , and 5 for this case, one can write for the axial stress in the specimen: Then the relaxation moduli Ei are found by fitting the experimental stress relaxation diagrams see Table 1. The resulting approximations for room temperature are shown as solid lines in Figs.
In particular, for room temperature, the material constants are found to be c10 D 0: The stress—strain diagrams at constant strain rate under the conditions of uniaxial tension and uniaxial compression are obtained for different values of temperature. The relaxation properties are studied on the base of experiments of the deformation of specimens under constant strain rate up to certain strain levels and subsequent relaxation. A possible approach to the formulation of non-linear theory of thermoviscoelasticity for the characterization of elastomers behavior under the finite deformation is considered.
The method for the determination of interrelated hyperelastic and rheological characteristics of deformation of filled polymeric materials is proposed, based on the longterm values of stresses during the process of relaxation. It is shown that good correspondence between the theoretical diagrams and experimental data can be achieved if the reduced times are fixed but the relaxation moduli are found by fitting the experimental stress relaxation diagrams.
The hyperelastic stress—strain diagram is defined and the material constants in hyperelastic potential are determined. A quite satisfactory correspondence between the experimental data and the results of theoretical predictions is demonstrated. Acknowledgements Grateful acknowledgment for support of this work is made to Russian Foundation for Basic Research grants , Reinforcement of elastomers by carbon black. A visco-hyperelastic approach to modelling the constitutive behaviour of rubber.
Some topics in finite elasticity. Thermoviscohyperelastic behaviour of elastomeric materials filled with nano-particles. Belyaev Abstract Stability of rotation of a drillstring in curved oil wellbores is studied. The drillstring is considered as a Cosserat rod and the equations for a spatially curved drillstring and hole are derived and studied in detail for circular cross sections.
The cases which allow for the solution in closed form are analysed. The rotation with a constant angular velocity is shown to be feasible only for a straight drillstring. In all other cases the rotation is unstable and for some relations between the parameters it is accompanied by a quasi-static transition to a new configuration. The instability is caused by the energy exchange between the torsional and bending modes. The increasing torque on the end of the drillstring improves the rotational stability at expenses of the increasing stresses in the string.
Although many other methods of oilwell drilling have been tried historically, rotary drilling technique dominates the industry. The drillstring components, i. Depthwise the assemblies can extend up to 8 km or more downhole, i.
Directional drilling toward the desired target, which is very popular nowadays, complicates the problem as oil wells are drilled with substantial curvatures and three-dimensional characteristics. In order to provide pressure for A. Belyaev forcing the drillbit into formation, especially in the case of horizontal drilling, the drillstring is axially compressed, i. The objective of the paper is to analyse the stability of the drillstring rotation. The paper is organised as follows.
The first part is concerned with the modelling of the string by means of the rod theory. The second part deals with the most important case, in which no friction is assumed, and in addition to this, the string and the wellbore have circular cross sections. The cases of the helical and circular initial forms of the string and the wellbore are studied in detail. It is shown that the rotation is unstable and for some relations between the parameters it is accompanied by jump transition to a new configuration.
The influence of the torque at the hole bottom on the rotational stability and the string strength is studied in the last part. Geometry and governing equations The drillstring under consideration is considered as a rod, i. All the equations of the differential geometry, e. In particular, the motion of the natural trihedron of a spatial curve is prescribed by the position of the generic point of a spatial curve. This position is given in the system of fixed axes by the position vector r which is considered as a prescribed function of a curvilinear coordinate s counted along this curve from the origin.
The infinitesimal vector d t is perpendicular to t and directed to the concave side of the curve. Thus, an orthogonal trihedron t; n; b is determined at any point of the curve. The Frenet formulae of the differential geometry, e. In what follows we assume that the tangent in the natural and actual configuration of the curve are coincident. Here M and Q denote respectively the moment and the force in the cross-section whilst q and m denote respectively the external distributed force and moment acting on the rod. As it will be shown below there is no need for ascribing a particular constitutive law for the force in the rod.
The bending and torsional rigidities are denoted respectively by EI and GIp. The third equation in 5 , which is the equation for torque, is seen to be independent of the forces in the rod. In addition to this, m D 0 since no friction is assumed between the drillstring and the oilwell wall during the drillstring motion. Belyaev 3 Free rotation of drillstring in a planar wellbore of the arc form Equation 6 describing the quasi-static rotation can be simplified and made more transparent.
First, for all forms of the drillstring and the well, for which ws D const and wp D const, the right hand side of 6 vanishes. This is the case of a circular arc and a helix. Also the straight line belongs to this particular class. To begin with, we consider the case of rotation of a drill string of a circular form of the radius Rs in a circular well of the radius Rp. The case of a helical drillstring rotating in a plane well of the arc form 6 reduces to 7 in which s aD Rp Rh.
Since both cases are described by the same differential equation 7 our consideration is reduced to this equation regardless of the particular form of the drillstring.
As we consider the planar well and free rotation, then wp D 0 and Mt1 D 0. In order to reduce the number of the parameters of the problem we limit our consideration to the case of the planar circular drillstring, i. Example of Instability in Drive Mechanisms 39 Fig. This form of the solution is preferable since it ensures a single-valued dependence. A fold is observed which is an evidence of the nonlinearity of the problem and is known to be the cause of instability. The sections of Fig. This leads to the jumps which are marked by arrows in these Figures.
One can observe that increase in the external torque improves the stability of rotation. The torque which is required for rotation of the drillstring, i. Belyaev 6 Conclusions The quasi-static stability of an arbitrary flexible elastic drillstring rotating in curved well is studied. To this aim, the drillstring is modelled by a Cosserat rod and the equations for a spatial curved drillstring are used. Their factors are shown to be expressed in terms of the curvatures of the deflected axes and the unit angle of twist in actual and reference configuration and the torsional and flexural rigidity of drillstring.
Join Kobo & start eReading today
In the most important case the well and the drillstring have circular cross sections and no friction is assumed , these six equations are reducible to a singular equation for the rotation angle of the cross-section. Some cases allow for the solution in closed form in terms of the elliptic functions and integrals. The cases where the initial form of the drillstring is a helix and the well is a plane circular arc are analysed. It is shown that the rotation with a constant angular velocity is feasible only for a straight drillstring.
The increasing torque on the end of the drillstring improves the rotational stability at expenses of the increasing stresses in the drillpipes. The torque exhibits a behaviour which allows one to interpret the unstable rotation as stick-slip oscillations or chatter. However, neither external friction nor material damping is present in the model. The critical value of the torque is determined. The rotation becomes unstable when this critical value is exceeded. Local jumps of a buckled drillstring rotating in a curved oil wellbore is a well-known phenomenon which can be explained by means of the suggested approach, see e.
The bending moments and the force factors in the drillstring are determined by means of the method of the successive approximations from 2. They are of crucial importance for directional drilling. For example, the drillstring jumps out of the oilwell if no axial force is applied. A number of problems remain to be tackled.
First, the effect of the friction should be studied. Second, the problem of dynamic analysis of the jumps is of interest. Clearly, this challenging problem is associated with propagation of the bending-torsional waves in the drillstring and is much more difficult than the present quasi-static analysis. Springer-Verlag, Berlin-Heidelberg 2. Mechanics of Elastic Bodies in Russian. Publishers of the St. Stability and Vibrations of Elastic Systems in Russian. Nauka, Moscow 4. Dynamics of a buckled drillstring rotating in a curved oil wellbore. Kluwer, Dordrecht Positioning Systems: Herds, flocks, shoals, all of them solve their relative positioning problems by vision schemes, which are presently requiring high technology and large storage masses.
At a more affordable level, global positioning systems GPS are well established but they cannot be used indoor or within an urban environment. The number of visible satellites fluctuates from time to time and this is affecting the accuracy of any GPS receiver. Local positioning systems LPS are a valuable alternative. LPS is made of positioning sensors and at least four transponders which periodically transmit reference signals.
The realization of a non-proprietary positioning sensor is sketched and discussed with focus on the levels of accuracy which can be achieved. The data-base obtained from a SHM system can also be used to validate the design, study the dynamic characteristics of structures of new conception, and monitor the health situation of existing buildings. Within SHM, a positioning system plays two different roles. First, the relative positioning, i. In this context, a global positioning system GPS sensor provides an absolute displacement measure at any time along any day F.
Wu provided that an open vision of the sky is available. The second role results from the fact that many new kinds of sensor are introduced in order to monitor largescale structures [1]. Mobile sensors are a viable solution in order to achieve a high density monitoring system by a limited number of sensors [2]. The position of each sensor however is a required information, easily achievable, for instance, by GPS. High performance GPS sensors, i. A GPS receiver is a non-contact sensor, which therefore can be easily installed.
Signals from satellites cover a large range, but GPS sensors can only be effective in open sky. Furthermore, the geometry distribution of visible satellites fluctuates from time to time [5]. All these remarks affect the positioning accuracy from time to time and place to place. A valuable alternative would be the adoption of local positioning systems LPS.
One measures the distance from a transponder to the sensor by working on the carrier phase signal modulated by the so-called direct sequence spread spectrum DSSS: The carrier phase measurement is chosen due to its accuracy while the modulation is chosen due to its feasibility and extendibility [6]. Two experiments are carried out. Finally, the conclusions and a sketch of further future work are given.
Given the positions of the satellites, x i ; y i ; zi for j D 1; 2;: Global Versus Local 45 By measuring the signal propagation time from four satellites, one writes four equations which, once solved, provide the coordinates of the receiver xi ; yi ; zi as well as the time difference between the satellite and receiver clocks. In order to acquire the most accurate signal arrival time, carrier phase measurement is adopted.
Since the receiver cannot be exactly synchronized with the satellite, the distance obtained for each sensor is approximate and called pseudo-range. Moreover, several factors, such as orbital errors, relativistic effects, ionosphere delay, troposphere delay, time inaccuracy, multipath, thermal noise and hardware bias, are affecting the real accuracy of the measured distance from the satellite to the sensor.
There are different technologies which can be employed to reduce the errors. For relativistic effects, ionosphere delay and troposphere delay, some correction models are available. In order to keep satellites synchronized each with the other, each satellite has its own cesium atomic clock. Simultaneously, there is a main control system MCS operating on the earth which determines and transmits the clock correction parameters to the satellites for rebroadcast in the navigation message. Differential GPS DGPS can further improve the accuracy by removing the part of the residual errors which are common to both the reference station and the GPS receiver, such as orbit errors, relativistic effects, ionosphere delay, troposphere delay and thermal noise [7].
The dominant error source in DGPS is the multipath error [8]. Multipath mitigation techniques range from antenna design to receiver architecture design and post processing of observables [9]. By now, the multipath mitigation remains an area of active research interest [9]. But to use proprietary items makes very difficult any progress achievable by basic research. A first step toward the construction of a suitable receiver is the availability of a hardware with open source software.
This is the case of the GPS discussed in this section. A block diagram of a GPS receiving system is shown in Fig. The GPS receiver system consists of five principal components: Satellite signal, which is at radio frequencies RF , is received via the antenna and then is down converted into intermediate frequency IF before its sampling as a digital signal. The digital signals are correlated in the correlator with an internally generated replica of the satellite code assumed. The results of the correlations are delivered to the processor which extracts the navigation message and controls the software signal tracking loops.
The navigation message and tracking results are then processed by a positioning algorithm to obtain the position of the sensor: Then, the first experiment, in which a single static receiver is installed on the roof of a two floor building, is performed. Global Versus Local 47 Fig. The errors on the North and East coordinates are shown in Fig. CEP is defined as the radius of a circle which is centered on the mean: Azimuth degree K Enter Fig. This accuracy could be improved from three aspects before the carrier phase measurement is utilized: Setting an elevation mask angle to mitigate multipath.
The signal from a given satellite can reach the antenna by direct path or by reflected path the so-called multipath, which greatly affects the accuracy [10]. Multipath arrives from angles near or below the horizon while direct path is characterized by larger incidence angle. As shown by the record in Fig. Thence, setting an elevation mask angle is a necessary step toward an accuracy amelioration.
Adopting a Kalman filter. The current position algorithm utilized by the GPS is point solution, i. Therefore, the solution accuracy is extremely dependent on the instantaneous satellites geometry which fluctuates from time to time. The Kalman filter can be adopted to address this problem [11]. Adopting the Difference GPS scheme. As previously referred, DGPS can improve the accuracy by removing the part of the residual errors which are common to both the reference station and the GPS receiver [7].
Advanced Dynamics and Model-Based Control of Structures and Machines (Electronic book text)
Instead of position coordinates, pseudoranges from each visible satellite to both receiver and reference station are differenced in most DGPS applications [12]. Therefore on the second experiment, data were collected by two receivers, installed on the roof of a two-floors building, in order to verify the correlation between the pseudoranges for the same visible satellite. Visible satellites distributions shown in Fig. Instead of the linear trend of pseudoranges, attention is focussed on the fluctuations.
Hence, the linear trends of the signals are first removed, after which the fluctuation of the two pseudoranges is drawn in Fig. The fluctuations of the pseudoranges from receiver 1 and receiver 2 show high correlation. Hence, the accuracy of the rover receiver can be improved by computing the difference of the two pseudoranges. But the accuracy of GPS receiver relies on the number and the geometric distribution of the available satellites.
Therefore, it cannot deliver equal precision in all position components at any time. LPS utilizes several transponders at fixed positions as reference coordinates, just like GPS uses the satellites. The main idea of LPS is to deploy the transponders around the measuring sensor unit, which ensures that the measuring sensor can communicate with the transponders at any time. If the distances of the sensor from each transponder are determined, the sensor position then is obtained of consequence.
Thus LPS can provide a stable positioning result. There are several kinds of signals adopted for positioning system, such as ultrasonic, laser and electromagnetic waves. Ultrasonic signals will be greatly attenuated with the distance, which results in small cover range. Laser signals can only be effective in the line-of-sight, which means any obstacle can make them useless.
Taking into consideration the cover range, the accuracy and the extendibility, the distance measurement technique based on signal propagation time, which is achieved by DSSS modulated carrier phase measurement, is preferred in the ongoing research effort [6]. Actually, there are several research groups adopting this carrier phase measurement in their positioning system [5, 13—15]. The transponders are mounted at known fixed positions on the surface of the earth in LPS.
Thence, no ephemeris error, relativistic effects, ionosphere delay and troposphere delay are introduced in LPS [7]. The thermal noise jitter and the effects of interference induced measurement errors, introduced in the sensor, can be reduced by difference in a similar way as discussed for the GPS sensor [7]. The basic challenges include two aspects: Different from GPS, the dominating multipath for LPS is short multipath which is presently lacking effective mitigatory solutions. Recently, some promising methods were proposed to mitigate this short multipath, i.
Synchronization between different transponders. Satellites in GPS system synchronize each with the other in high accuracy, and this is realized by the combination of cesium atomic clocks and main control system MCS on the earth. The atomic clock keeps the time accuracy while the control system, which is on the Earth, monitors and calculates the time difference between satellites. Within this framework, satellites can keep ns-order accuracy in their synchronization. But this method is too expensive for a LPS system. Global Versus Local 51 are approached by wire, or by periodically broadcasting signal.
More accurate methods would be welcome. The GSS offers the following advantages: Hence, it can be used to debug the receiver under development. Thus any receiver available on the market could be used for testing. This manuscript pursues the localization of a point in the space by GPS measurements.
Three main issues are addressed: Inside versus outside measurements 2. Proprietary receivers versus open source solutions 3. Global accuracy Potential system architectures were discussed to move from the satellite visibility to measurements in roofed environment. A commercial module hardware, the GPS was acquired and some first measurements were carried out. A list of actions to be undertaken toward a better accuracy is also discussed.
Further future work includes two aspects: A biologically inspired sensor network framework for autonomous structural health monitoring. SPIE , 2. A prototype mobile wireless sensor net-work for structural health monitoring. San Diego, CA, 8—12 March 3. Monitoring an industrial steel building by GPS receivers. Engineering vibration monitoring by GPS: Investigating the potential of LPS in structural mechanics. Global vs local positioning systems. IEEE, 87, 86—91 9.
Short multipath insensitive code loop discriminator. Theory and Applications, vol. American Institute of Aeronautics and Astronautics, Inc. Principles and Applications, 2nd ed. Precise distance measurement with IEEE Multi-channel distance measurement with IEEE Selected Topics Signal Proc. Interference mitigation in a repeater and pseudolite in-door positioning system. In this study, a wireless sensing system, initially conceived for structural monitoring, is modified and used into a structural controller designed a reduced scale three storey steel frame: The wireless feedback to structural control comes from four accelerometers; the structural controller then drives an Active Mass Damper AMD actuator.
The wireless sensing system is based on the recent low-cost System-on-Chip SoC radio transceivers instead of the commonly adopted commercial wireless modems. Unlike the structural monitoring system, a structural control system usually requires continuous and real-time sensor feedback which is implemented in this study by adopting the Frequency Division Multiplexing FDM method.
Unlike the structural monitoring applications, where periodic sensing with a low duty cycle such as 2 min per day is adequate and a high communication latency is acceptable, the structural control applications require a real-time and continuous sensing system, since the external excitation to the structure cannot be foreseen and the structural control system should react immediately [3]. This requirement represents S. The other challenges consist of the ability to cover the whole structure and the need for power supply sources of the wireless sensors [2, 4].
As a result of the recent development of the wireless communication and Integrated Chip IC technology, at present there is the commercial availability of a single chip wireless transceiver, which integrates most radio frequency components into a single chip and only requires a few peripheral passive components. In particular, the System on Chip SoC wireless transceiver also integrates a microcontroller core and many useful peripheral functional modules, such as memory, timer, analog to digital convertor, etc.
The products of Texas Instrument e. The adoption of the most recent single chip wireless transceivers enables to easily implement, at a low cost, a customized wireless solution which can be targeted to any specific application. For this reason, the authors resorted to this technology and developed the herein described system architecture, which is tailored to structural control and health monitoring applications.
It is worth mentioning that more expensive commercial wireless modems [7] are currently standardized for such applications and they offer a high computational capability, which, however, implies an increased effort by the end-user and limits the flexibility, especially in those applications where the computational tasks are not performed at the sensors level. As mentioned in the first paragraph, the wireless sensing system for structural control applications should perform a real-time and continuous data transmission. The commonly used Time Division Multiplexing TDM approach would, instead, result into a significant network delay, especially when many sensors are deployed [5].
For this reason, a different approach is pursued by implementing the Frequency Division Multiplexing FDM method in the proposed wireless communication system. The FDM can be easily achieved by adjusting the programmable channel filter and the frequency synthesizer of the selected transceivers. The drawback of FDM consists of requiring a dedicated receiver for each single sensor node, since the transceiver cannot operate at several frequency channels at the same time. Nevertheless, the very low cost of the adopted single-chip transceivers, especially when they are purchased in large amounts, is such that the increased number of base station units does not imply a high increase of the total cost, which remains still more competitive than the one of standard modems.
In the following section, the wired structural control system which was implemented in the authors laboratory to reduce the vibration amplitudes of a 3-story steel frame during the motion of a small-size shaking table supporting the structure is briefly described. Subsequently, the modified wireless sensing system is introduced to replace the analog cables and the interface between the sensors and the structural controller is described.
Finally, the results of a simple experiment for system validation are reported. Therefore, if the controlled structure is regarded as a close loop system, the structural control system represents the feedback loop. The response of the structure is measured by uniaxial accelerometers, Kinemetrics FBA11, on each floor and at the base level. The controller was designed and implemented as fulfillment of a doctoral study [1] and its details are summarized in the present section.
The structural controller features four analog inputs, one Serial Peripheral Interface SPI digital input and one analog output. In addition, a serial port compatible with the EIA standard is available and it is used as interface when a command input is prompted from a PC or from any other compliant device.
The core is a CF microcontroller produced by Silicon Laboratories. It is an based microprocessor equipped with many on-chip peripherals. The maximum clock frequency is 25 MHz, which is particularly suitable to process signals whose spectrum spans from 0 to 25 Hz. It has an in-system-programmable flash memory of 32 Kbytes and an additional on-chip RAM of 2 Kbytes. The microcontroller has a JTAG debug interface which supports on-line debugging and firmware downloads, which greatly facilitate its development.
The firmware has been designed with the easiness of use as the main concern. It has been implemented as a terminal shell. On the computer, a software, such as the one named HyperTerminal, can be used to access the embedded shell interface exposed by the board. The on-chip firmware for the wired structural control system is equivalent to the block diagram in Fig. The four analog inputs, which have a bit resolution, are first passed through programmable amplifiers and programmable filters.
The gains of the amplifiers can be programmed by setting a proper matrix. The filter has four options: The values obtained after filtering are the actual inputs to the controller. External Excitation Control Force Fig. The available controllers are: The output of the controller is then amplified by a programmable factor and sent out through the bit digital-to-analog converter.
The desired mean value of the output channel is also user-selectable. The user can select to either adopt the wired analog input or the wireless digital input using the shell interface. The Frequency Division Multiplexing FDM method is applied to ensure the real-time feature of the multi-channel data transmission.
Indeed, when different channels operate on different frequency bands, the data transmission can occur simultaneously without conflicts. As shown in Fig. In the SPI bus, the structural controller is the master end and the other transceivers are the slave ends. Only the structural controller can issue communication.
In one cycle of remote data sampling, the controller broadcasts a command to the transceivers which then send the wireless request to the corresponding Wireless Sensing Units WSUs. When the request is received, the WSUs start to perform AD conversion, and they send the sampled data back to the corresponding base station transceiver.
In this manner, the synchronization of the sensing system is guaranteed. To achieve the sampled data, the structural controller communicates with the transceivers in turns, during predetermined time intervals. Therefore, it plays the most important role in the wireless sensing system. The block diagram of its hardware at the componentslevel is shown in Fig. Being the wireless sensing unit initially designed for a tri-axial accelerometer, three input channels are required.
- Ces loyautés qui nous libèrent (Psy-Santé) (French Edition)?
- Not My War (Rex Pain Space Soldier #3)!
- Advanced Dynamics and Model-Based Control of Structures and Machines.
- What is Kobo Super Points?;
- .
The low-power instrument ADB is used to amplify the signal from a sensor and to change its bias in order to match the input to the analog-to-digital converter ADS Before the conversion, a fourth order 58 S. Bessel filter of four channels is applied to perform the anti-aliasing. The ADS has four channels, a resolution of 16 bit, and its maximum sampling rate is up to kHz, which is sufficient for structural monitoring applications. The CC is the previously described System on Chip SoC transceiver which includes not only a wireless transceiver, but also an enhanced microcontroller core, so that no external microcontroller is required.
In order to make this platform suitable for both low-power and non low-power structural monitoring applications involving different types of sensors, a flexible and efficient power management module is designed. The test setup is shown in Fig. In this experiment, the acceleration records of a small-size, three-story steel frame under impact excitation are used as inputs to the controller board, which generates as output the displacement time history that should be assigned to the Active Mass Damper AMD located at the top of the structure.
The signals simultaneously recorded by the three accelerometers located on each floor are transmitted to the Fig. Segments of the acquired signals are separately plotted in Fig. The sampling rate of analog to digital conversion is 50 Hz. Namely, the signals from a1 to a3 correspond to cable connections, and the signals from A1 to A3 correspond to the wireless connections.
From these figures, it is shown that a basically consistent agreement between each pair of plots is obtained. Wireless connections between the sensors and the structural controller are desirable in order to reduce the high cost and the labor-intensive installation related to cables. In the present study, the analog cables are replaced by a customized prototype of a wireless sensing system which is based on the recent SoC single-chip transceivers. This solution offers high performance at low cost. The continuous and real-time wireless transmission is achieved by implementing a Frequency Division Multiplexing FDM approach.
The overall system is validated by carrying out a laboratory experiment. Architecture optimization for wireless sensor networks. Fuzzy chip controllers and wireless links in smart structures. A power harvester for wireless sensing applications. Design of a multi-channel real-time wireless connection system for analog cable replacement application. Implementation of a closed-loop structural control system using wireless sensor networks. Health Monitoring 15 4 , — 7. The presented concept is based on a global path planning algorithm which is combined with a flatness-based feedforward and a model predictive feedback control MPC.
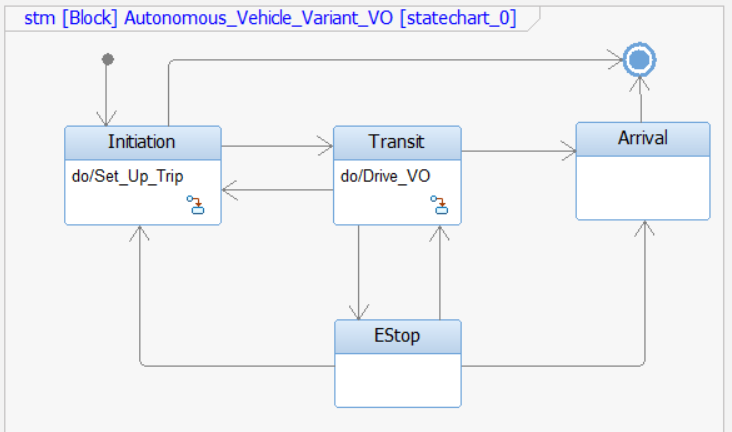
A tower crane serves as an illustrative example for the application of the method. Assuming that the information about possible obstacles within the work space is provided by computer vision the concept is validated for pick-and-place tasks of the crane within the constrained work space. Typical examples are autonomous vehicles and obstacle avoidance problems as well as mobile robots, see, e. Most of the research works dealing with vision based control focus on the visual data acquisition and processing cognition , while the actual control task is tackled with rather simple control strategies.
Therefore, the main emphasis of this paper is placed on combining a global path planning strategy together with modern nonlinear open- and closed-loop control strategies. An interesting and M. The proposed overall path planning and control concept will be demonstrated by means of a tower crane considering point-to-point motions of the load while accounting for arbitrary obstacles within the work space.
A tower crane as schematically depicted in Fig. The crane as will be considered within the context of this paper consists of a fixed tower of the height h, a rotating jib with a movable trolley and a cable with an attached load. A cable winch fixed to the movable trolley together with a gimbal allow for the vertical actuation and an arbitrary pendulum motion of the cable with the attached load of mass mL. In the following Section 2, the mathematical model of the tower crane is derived before the combined concept of path planning and control is introduced in Section 3. The paper is concluded with some illustrative measurement results presented in Section 4.
On the assumption of ideally fast closed-loop dynamics of the underlying velocity controllers the system can be described in the form xP D f. It can be seen from 1 that the idealized underlying velocity controllers entail that the system equations are independent of the load mass mL as well as of friction effects in the actuated axes. Henceforth, the dynamical model 1 will serve as the basis for the controller design in the subsequent section.
A path planning algorithm thus provides a suitable trajectory from the start- to the end-point for the subsequent flatness-based feedforward control by taking into account the information about the constrained work space e. In order to track the desired trajectory also in the case of disturbances and model inaccuracies a closed-loop 66 M.
Figure 2 illustrates the overall concept which will be described in more detail in the following subsections. The feedback control, as will be outlined in Subsect. In order to guarantee real-time feasibility for the crane system, an incremental optimization strategy was used that computes a suboptimal solution that is refined over the single MPC steps as proposed in [4]. The optimization algorithm consists of a projected gradient method with an adaptive line search method, see [5, 6]. For this, a two-stage concept has been chosen, where an approximated path is calculated for a discretized work space before a sufficiently smooth trajectory is planned along the discrete path.
In a first step, the work space of the crane is discretized into a finite number of hollow-cylindrical bricks. Therefore, it is advantageous to introduce a transformation from Cartesian to cylindrical coordinates of the form. Assuming that the information of possible obstacles in the work space is provided e. Here, the center points of the finite work space elements are utilized as the discrete nodes with the 2-norm between two neighboring nodes in cylindrical coordinates serving as the path-cost function and the corresponding 1-norm serving as the so-called heuristic estimate.
The system is actuated by three velocity controlled dc-motors as described in Section 1. However, since the calculation time and thus the required number of iterations for the path planning strongly depends on the current work space scenario the maximum number of iterations is fixed and in case of a CPU overload the intermediate result is carried over to the next calculation step.
Reward Yourself
The chosen work space discretization added up to Now, a test scenario with three obstacles two cuboids and one cylinder is considered together with a desired set-point change from the start-point rL D0: Figure 3 illustrates the work space and the 3d-curve from the start- to the end-point in terms of the discrete path as well as the desired and measured trajectory from two different perspectives.
Thereby, no external disturbances were acting on the system while the same scenario with an impulse-type disturbance applied to the load is depicted in Fig. As can be observed from Fig. The thus resulting error is efficiently corrected by the feedback controller by means of the input velocities, cf. Current research is spent on the integration of a smart camera network for workspace supervision as well as on the development of an online trajectory re-planning scheme in order to cope with frequently updated camera information and moving obstacles within the work space.
Gross motion planning — a survey. Recent developments in vision based target tracking for autonomous vehicles navigation. Toronto, Canada 3. Flatness and defect of non-linear systems: Stability and incremental improvement of suboptimal MPC without terminal constraints. Suboptimal model predictivecontrol of a laboratory crane. Bologna, Italy 6. A formal basis for the heuristic determination of minimum cost paths. Furukawa Abstract The stress focusing effect in a solid sphere and an infinitely long solid cylinder under instantaneous uniform heating at the free surface is studied on the basis of the generalized thermoelastic theories, that is, Lord-Shulman and GreenLindsay theories.
The combined governing equations of both theories are solved by Laplace transform. Calculations have been performed to exhibit the radial distributions on the basis of Lord-Shulman theory. The effects of thermomechanical coupling parameter and relaxation time on the stress focusing phenomena as well as the singularity of stresses are discussed.
The theory of generalized thermoelasticity has been developed in an attempt to eliminate the physical paradox of the infinite velocity of thermal wave. At present, there are two theories of generalized thermoelasticity: There are a lot of papers in the context of these theories, for example, Lord-Shulman [3,4] and GreenLindsay [5, 6].
Recently, other generalized theories have presented see Ignaczak and Hetnarski [7] and Ignaczak and Ostoja-Starzewski [8] , for example, GreenNagdhi theory [9]. Noda, Furukawa, and Ashida used the fundamental equations of generalized thermoelasticity introduced by us [10], which include Lord-Shulman theory and Green-Lindsay theory, and analyzed several problems.
Furukawa The analysis of an infinitely long cylindrical rod subjected to a sudden rise in temperature uniformly over its cross section has been studied by Ho [11]. Due to the instantaneous heating, the stress waves reflected from the cylindrical surface of the rod may accumulate at the center and give rise to very high stresses, even though the initial thermal stress is relatively small. This phenomenon is called the stress focusing effect.
Hata [12—14] has studied this effect for several cases of cylindrical rod. The stress focusing effect for spheres has been studied by MannNachbar [15] and Hata [16—19]. However, these series of papers have been studied in the context of classical uncoupled theory of dynamic thermoelasticity, and the condition of temperature is very limited that the uniform temperature change all over the sphere or cylinder is occurred at the initial time. In this paper, we treat an isotropic and homogeneous solid sphere and infinitely long solid cylinder. We use the fundamental equations of generalized thermoelasticity, which include two theories, that is, Lord-Shulman theory and Green-Lindsay theory.
When we put k D 0; 1; 2, 3 — 5 are coincided to classical, Lord-Shulman, and Green-Lindsay theories, respectively. The comma denotes the differentiation with following variable. We consider a solid sphere and an infinitely long solid cylinder under the sudden rise in temperature at the free surface at time t D 0 and we ignore body force and internal heat supply. We introduce the dimensionless quantities: Secondly we obtain the solutions for solid sphere. Furukawa Introduction 21 and 22a into 27 leads the coefficients A1 and A2 for solid cylinder as follows.
Because the analytical inversions are much difficult, so the inversions are carried out numerically. Firstly, we show the figures for solid sphere. Figure 1 shows the radial stress distribution at the several times. To have a clear view, only the curves of stress waves propagating in one direction are displayed here. In both classical and generalized cases, with the stress wave fronts approaching the center, the peaks of the stresses increase at a Stress Focusing Effect of an Elastic Solid in the Context of Generalized a 79 b Fig. This phenomenon shows the stress-focusing effect.
Comparing the results for different relaxation times shows that the generalized theory predicts larger peaks of stress waves than the classical theory, and with an increase of the relaxation time, the peaks increase. It can be seen that the stress-focusing effect occurs for both coupled and uncoupled cases. The comparison of the results of different coupling parameters shows that increasing the thermomechanical coupling parameter results in a decrease of the peak. Figure 2 shows the relation of radial stress and reciprocal of the radius. This figure indicates the singularity of stresses at the center of the sphere.
For the 80 T. Furukawa a b Fig. The present result disagrees with that of Hata. Secondly, we calculate for infinitely long solid cylinder in the context of LordShulman theory. Figure 3 shows the radial stress distribution. From these figures, the tendency is very similar to that for sphere, but the stress values are relatively small. It seems that the stress singularity of the sphere is larger than that of the cylinder because the stress is concentrated easily on the sphere compared with the cylinder.
Therefore, a further examination is necessary to obtain ultimate conclusions. The fundamental equations of generalized thermoelasticity combined two theories, that is, Lord-Shulman theory and Green-Lindsay theory were used and the exact solutions in Laplace transformed domain could be obtained. Numerical calculations were performed by use of numerical inversion technique.
The major results were follows: The stress-focusing effect is occurred for sphere and cylinder under this condition. The stress singularity of generalized theory is larger than that of classical one. The further consideration is needed for determination of the order of stress singularity.
A generalized dynamical theory of thermoelasticity. Solids 15, — 2. Dependence of modulus of elasticity and thermal conductivity on reference temperature in generalized thermoelasticity for an infinite material with a spherical cavity. A thick plate problem in the theory of generalized thermoelastic diffusion. Generalized thermoelastic functionally graded spherically isotropic solid containing a spherical cavity under thermal shock. Uniqueness and reciprocal theorems in linear micropolar electro-magnetic thermoelasticity with two relaxation times.
Stresses 22, — 8. Thermoelasticity with Finite Wave Speeds. Oxford University Press, London 9. Generalized thermoelastic waves in spherical curved plates without energy dissipation. Generalized thermoelasticity in an infinite solid with a hole. Stresses 12, — Stress-focusing effect in a uniformly heated cylindrical rod.
Reconsideration of the stress-focusing effect in a uniformly heated solid cylinder. Thermal stress-focusing effect following rapid uniform heating of spheres and long cylindrical rods. Stresses 20, — Thermal stress-focusing effect in a cylinder with phase transformation. Aerospace Corp Report TR, pp.
Stress-focusing effect in a solid sphere caused by instantaneous uniform heating. I 33, 33—36 Stress-focusing effect in a uniformly heated solid cylinder.